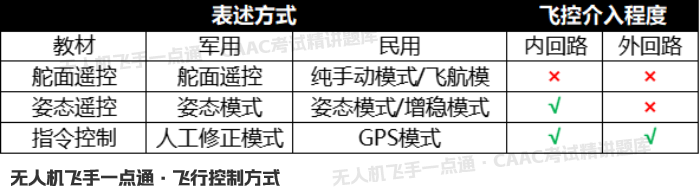
______是在无人机具有姿态控制机构的基础上,通过操纵杆控制无人机的俯仰角、滚转角和偏航角,从而改变无人机的运动。
A.舵面遥控
B.姿态遥控
C.指令控制
参考答案:B
题目解析: